Cos’è il protocollo CANopen?
CAN livelli fisico e trasporto
CAN è un bus di campo che funziona con il metodo CSMA / CA (Carrier Sense Multiple Access / Collision Avoidance). Significa che le collisioni durante l’accesso al bus sono evitate da un cosiddetto “arbitrato” bit per bit. I bit sono codificati NRZ-L (Non Return to Zero – Low).
Un controllo di ridondanza ciclico (CRC) e altri meccanismi di sicurezza forniscono una trasmissione sicura. Per la sincronizzazione viene utilizzato un meccanismo chiamato “bit stuffing”. CAN è un sistema multi-master, ovvero è possibile collegare più nodi bus uguali senza un master bus che supervisioni la comunicazione. In linea di principio un bus CAN può essere realizzato con filo di rame o cavo in fibra ottica.
L’implementazione CAN comune con filo di rame funziona con segnali differenziali, trasmessi tramite due fili: CANHIGH, CANLOW. Pertanto CAN ha un buon rapporto di reiezione della modalità comune.
I dati vengono trasmessi con bit che possono essere dominanti o recessivi. Il dominante (0) sovrascrive sempre il recessivo (1).
La topologia di una rete CAN è una linea, che può essere estesa da stub., tuttavia la lunghezza massima di uno stub è limitata a 0,5 m.
La rete deve sempre essere terminata su entrambe le estremità con 120 Ohm ciascuna (tra CANHIGH e CANLOW). Altre posizioni o valori non sono ammessi.
L’arbitrato sopra menzionato viene utilizzato per controllare l’accesso al bus dei nodi mediante la definizione delle priorità dell’identificatore CAN dei diversi messaggi.
Ogni nodo controlla il bus, se più di un nodo desidera l’accesso al bus, il nodo con la priorità più alta dell’ID messaggi ha esito positivo e gli altri nodi si ritirano fino a quando non si verifica un “silenzio” sul bus (vedere l’esempio seguente). Tecnicamente il primo bit dominante dell’ID invio sovrascrive il corrispondente bit recessivo degli altri ID. Nel caso in cui più di un nodo utilizzi lo stesso CAN-ID, si verifica un errore solo in caso di collisione all’interno del resto del frame. In linea di principio un CAN-ID deve essere utilizzato solo da un singolo nodo.
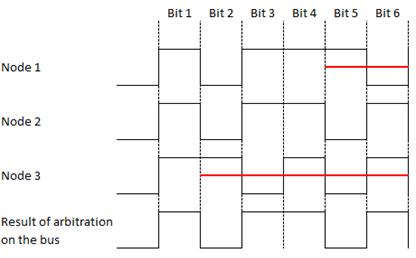
A causa dell’arbitrato c’è una classifica dei messaggi. Il messaggio con l’ID più basso ha la priorità più alta e quindi ha un accesso quasi istantaneo sul bus. L’eccezione è che una trasmissione in corso non verrà interrotta. Quindi i messaggi time-critical dovrebbero essere assegnati ai CAN-ID ad alta priorità, ma anche in questo caso non vi è alcuna determinazione nel tempo di trasmissione (trasmissione non deterministica).
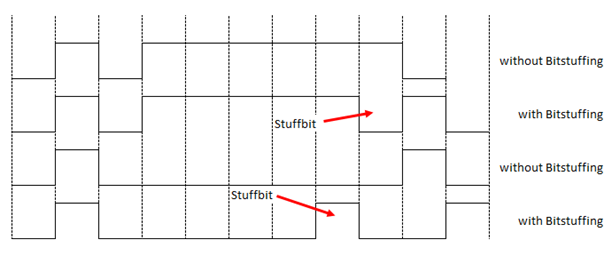
Per l’arbitrato tutti i nodi devono essere sincronizzati. A causa della mancanza di un segnale di clock separato, la trasmissione di molti bit identici in linea comporterebbe la perdita della sincronizzazione. Il cosiddetto bit-stuffing viene utilizzato per prevenire questo caso. Dopo cinque bit uguali verrà inserito un bit complementare nella trasmissione (l’applicazione non lo noterà). In questo modo i nodi possono continuare a risincronizzare sui fronti dei bit (vedere la figura seguente).
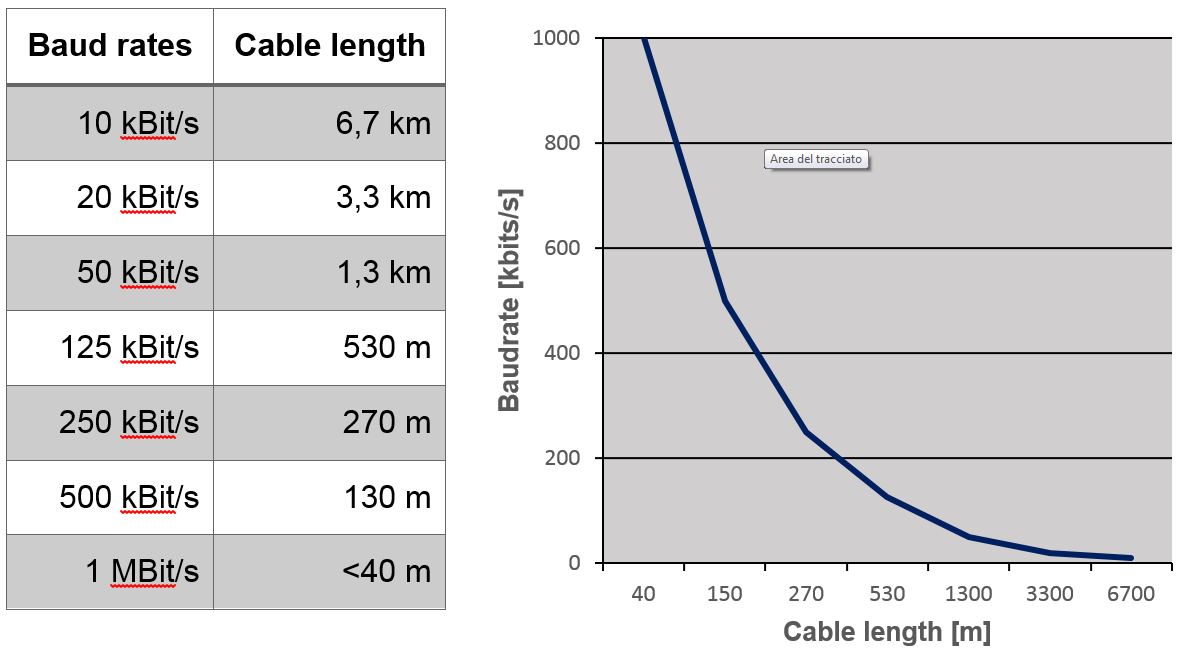
Una rete CAN può funzionare con velocità di trasmissione fino a 1 Mbit/s.
A causa della necessaria sincronizzazione dei nodi, il ritardo massimo causato dalla lunghezza del cavo deve essere limitato, la limitazione corrisponde al baudrate. Esiste una raccomandazione comune sulla lunghezza massima del cavo a diverse velocità di trasmissione:
CANopen
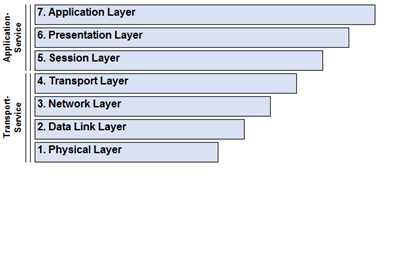
CANopen è un protocollo superiore specificato (protocollo di livello 7)
Con CANopen è possibile trasferire grandi quantità di dati, telegrammi di emergenza e dati di processo.
CANopen descrive come viene eseguita la comunicazione. Ciò significa che i parametri per configurare un dispositivo vengono trasmessi in una forma (profilo) definita.
Un profilo CANopen definisce oggetti che rappresentano le diverse funzioni di un dispositivo. Questi oggetti formano una tabella chiamata dizionario oggetti.
Il profilo di comunicazione definisce i servizi di base e i parametri di un dispositivo CANopen (ad es. Oggetti dati di servizio SDO, oggetti dati di processo PDO, CAN-ID
usati, ecc.). Il profilo del dispositivo definisce le funzioni specifiche di una famiglia di dispositivi (ad es. Encoder, dispositivi di I/O, …).
Per gli encoder il profilo del dispositivo è il Profilo encoder CiA 406.

