Cos’è il protocollo EtherCAT?
EtherCAT è Industrial Ethernet e utilizza frame standard e livello fisico come definito nello standard Ethernet IEEE 802.3. Tuttavia, risponde anche alle esigenze specifiche affrontate nel settore dell’automazione, dove:
· ci sono requisiti in tempo reale difficili con tempi di risposta deterministici
· il sistema di solito è composto da molti nodi, ognuno dei quali ha solo una piccola quantità di dati come processo di scambio ciclico
· i costi dell’hardware sono ancora più importanti che nelle applicazioni IT e d’ufficio
I requisiti di cui sopra rendono praticamente impossibile l’utilizzo di una rete Ethernet standard a livello di campo. Se viene utilizzato un singolo telegramma Ethernet per ciascun nodo, la frequenza dei dati effettivi diminuisce in modo significativo per pochi byte di dati di processo ciclici:
il telegramma Ethernet più corto è lungo 84 byte (incluso Inter Frame Gap), di cui 46 byte possono essere utilizzati per dati di processo. Ad esempio, se un’unità invia 4 byte di dati di processo per la posizione effettiva e le informazioni sullo stato e riceve 4 byte di dati come nuova posizione e controllo la velocità dati effettiva per entrambi i telegrammi scende a 4/84 = 4,8%. Inoltre, l’azionamento solitamente ha un tempo di reazione che innesca la trasmissione dei valori effettivi dopo aver ricevuto i valori target.
Alla fine, non rimane molto della velocità di trasferimento di 100 MB/s.
Gli stack di protocollo, come quelli utilizzati nel mondo IT per la connessione di routing (IP) (TCP), richiedono un sovraccarico aggiuntivo per ciascun nodo e creano ulteriori ritardi durante i runtime dello stack.
EtherCAT supera le diffi coltà descritte nella sezione precedente con la sua modalità operativa ad alte prestazioni, in cui un singolo frame è in genere sufficiente per inviare e ricevere dati di controllo da e verso tutti i nodi!
Il master EtherCAT invia un telegramma che passa attraverso ciascun nodo. Ogni dispositivo slave EtherCAT legge i dati indirizzati ad esso al volo e inserisce i suoi dati nel frame mentre il frame si sposta a valle. Il frame è ritardato solo dai tempi di ritardo di propagazione dell’hardware. L’ultimo nodo in un segmento o ramo rileva una porta aperta e rimanda il messaggio al master utilizzando la funzione full duplex della tecnologia Ethernet.
La velocità dati massima effettiva del telegramma aumenta a oltre il 90% e, grazie all’utilizzo della funzione full duplex, la velocità dati teorica effettiva è addirittura superiore a 100 MBits/s.
Il master EtherCAT è l’unico nodo all’interno di un segmento a cui è consentito inviare attivamente un frame EtherCAT; tutti gli altri nodi si limitano a inoltrare i frame a valle. Questo concetto previene ritardi imprevedibili e garantisce funzionalità in tempo reale.
Il master utilizza un Ethernet Media Access Controller (MAC) standard senza un processore di comunicazione aggiuntivo. Ciò consente di implementare un master su qualsiasi piattaforma hardware con una porta Ethernet disponibile, indipendentemente dal sistema operativo in tempo reale o dal software applicativo utilizzato.
I dispositivi slave EtherCAT utilizzano un controller slave EtherCAT (ESC) per elaborare i frame al volo e interamente in hardware, rendendo prevedibili le prestazioni della rete e indipendenti dall’implementazione del singolo dispositivo slave.

EtherCAT incorpora il suo payload in un frame Ethernet standard. Il frame EtherCAT è identificato con l’identificatore (Ox88A4) nel campo EtherType.
Poiché il protocollo EtherCAT è ottimizzato per brevi dati di processo ciclici, è possibile eliminare l’uso di stack di protocollo ingombranti, come TCP/IP o UDP/IP. Per garantire la comunicazione IT Ethernet tra i nodi, è possibile effettuare il tunneling delle connessioni TCP / IP attraverso un canale di mailbox senza influire sul trasferimento dei dati in tempo reale.
Durante l’avvio, il dispositivo master configura e mappa i dati di processo sui dispositivi slave. Diverse quantità di dati possono essere scambiate con ogni slave, da un bit a pochi byte o anche fi no a kilobyte di dati.
Il frame EtherCAT contiene l’intestazione del frame e uno o più datagrammi.
L’intestazione del datagramma indica il tipo di accesso che il dispositivo master vorrebbe eseguire:
– Leggi, scrivi o leggi-scrivi
– Accesso a un dispositivo slave specifico tramite indirizzamento diretto o accesso a più dispositivi slave tramite indirizzamento logico (indirizzamento implicito) L’indirizzamento logico viene utilizzato per lo scambio ciclico dei dati di processo. Ogni datagramma si rivolge a una parte specifica dell’immagine di processo nel segmento EtherCAT, per il quale sono disponibili 4 GByte di spazio di indirizzi. Durante l’avvio della rete, a ciascun dispositivo slave vengono assegnati uno o più indirizzi in questo spazio di indirizzi globale. Se a più dispositivi slave sono assegnati indirizzi nella
stessa area, possono essere indirizzati tutti con un singolo datagramma.
Poiché i datagrammi contengono completamente tutte le informazioni relative all’accesso ai dati, il dispositivo master può decidere quando e quali dati accedere. Ad esempio, il dispositivo master può utilizzare brevi tempi di ciclo per aggiornare i dati sugli azionamenti, mentre utilizza un tempo di ciclo più lungo per campionare l’I/O; non è necessaria una struttura dati di processo fissa. Ciò allevia anche il dispositivo master rispetto ai sistemi bus di campo convenzionali, in cui i dati di ciascun nodo dovevano essere letti singolarmente, ordinati con l’aiuto del controller di processo e copiati
in memoria.
Con EtherCAT, il dispositivo master deve solo riempire un singolo frame EtherCAT con nuovi dati in uscita e inviare il frame tramite accesso diretto alla memoria (DMA) al controller MAC.
Quando viene ricevuto un frame con nuovi dati di input tramite il controller MAC, il dispositivo master può nuovamente copiare il frame tramite DMA nella memoria del computer, il tutto senza che la CPU debba copiare attivamente alcun dato.
Linea, albero, stella o collegamento daisy-chain: EtherCAT supporta quasi tutte le topologie. EtherCAT rende possibile una pura topologia di bus o linea con
centinaia di nodi senza le limitazioni che normalmente derivano da switch o hub a cascata.
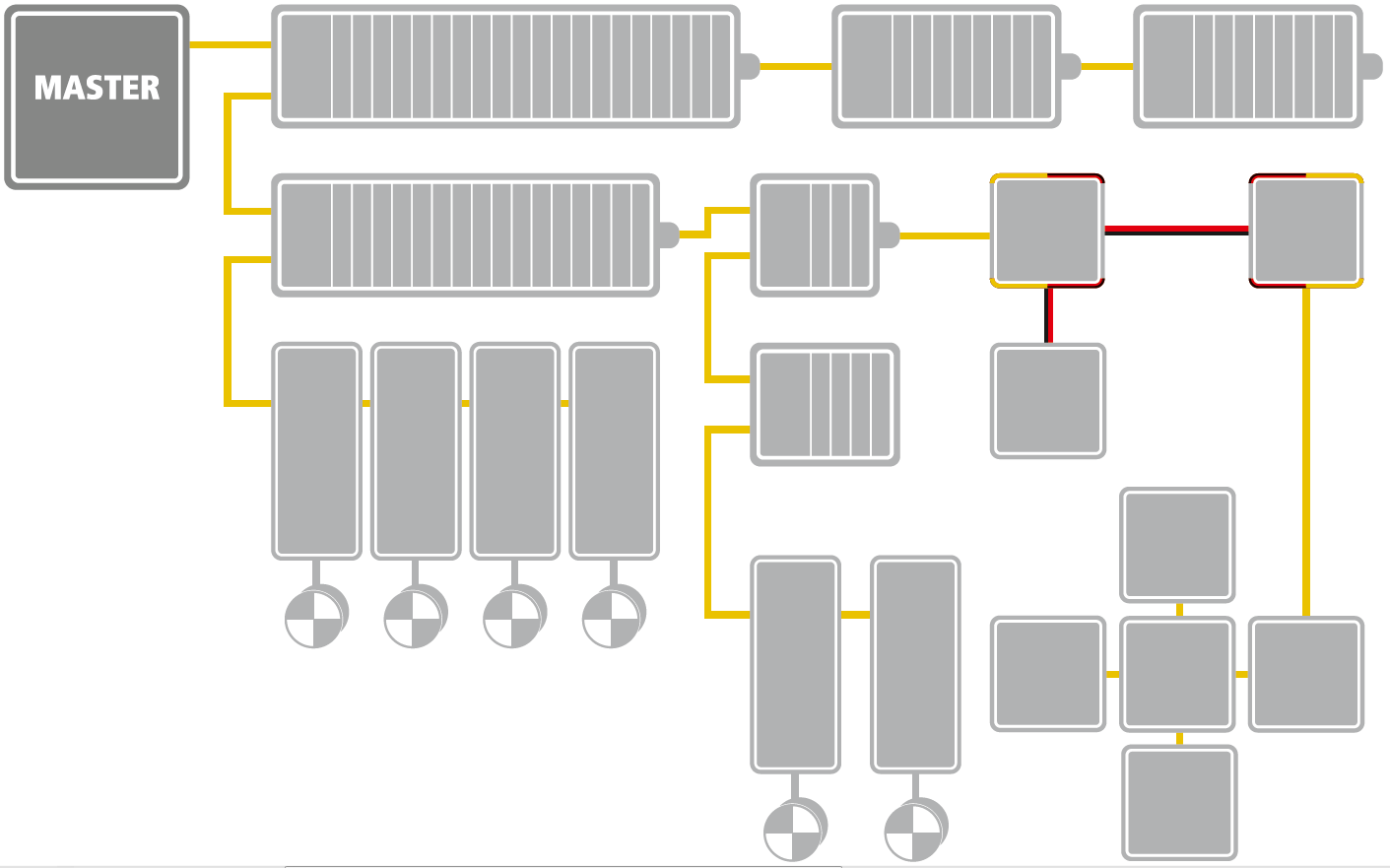
Quando si collega il sistema, la combinazione di linee con diramazioni o linee di derivazione è particolarmente vantaggiosa: le porte necessarie per creare diramazioni sono integrate direttamente in molti moduli I / O, quindi non sono richiesti switch aggiuntivi o componenti di infrastruttura attiva.La topologia a stella, la classica Ethernet, può anche essere utilizzata naturalmente.
Le macchine modulari o i cambia utensili richiedono la connessione e la disconnessione di segmenti di rete o singoli nodi durante il funzionamento.
I controller slave EtherCAT includono già la base per questa funzione Hot Connect. Se viene rimossa una stazione vicina, la porta viene automaticamente chiusa in modo che il resto della rete possa continuare a funzionare senza interferenze. Tempi di rilevamento molto brevi superiori a 15 microsecondi garantiscono un passaggio senza problemi.
EtherCAT offre molta flessibilità per quanto riguarda i tipi di cavo, quindi ogni segmento può utilizzare il tipo esatto di cavo che soddisfa al meglio le sue esigenze. In modalità 100BASE-TX è possibile utilizzare un cavo Ethernet industriale economico tra due nodi fino a 100 m di distanza.
Inoltre, l’aggiunta del protocollo EtherCAT P consente la trasmissione di dati e alimentazione tramite un singolo cavo. Questa opzione consente il collegamento di dispositivi come sensori con una sola linea. È inoltre possibile utilizzare fibre ottiche (come 100BASE-FX), ad esempio per una distanza del nodo superiore a 100 m. La gamma completa di cablaggi Ethernet è disponibile anche per EtherCAT. È possibile collegare fino a 65.535 dispositivi a un segmento EtherCAT, quindi l’espansione della rete è praticamente illimitata. A causa del numero praticamente illimitato di nodi, è possibile progettare dispositivi modulari come stazioni I / O suddivise in modo tale che ciascun modulo sia un Nodo EtherCAT a parte. Quindi, il bus di estensione locale viene eliminato; le elevate prestazioni di EtherCAT raggiungono ogni modulo direttamente e senza ritardi, poiché non vi sono più gateway nell’accoppiatore del bus o nella stazione principale.
Per configurare e diagnosticare i dispositivi slave, è possibile accedere alle variabili fornite per la rete con l’aiuto della comunicazione aciclica. Questo si basa su un protocollo di mailbox affidabile con una funzione di ripristino automatico per messaggi errati.
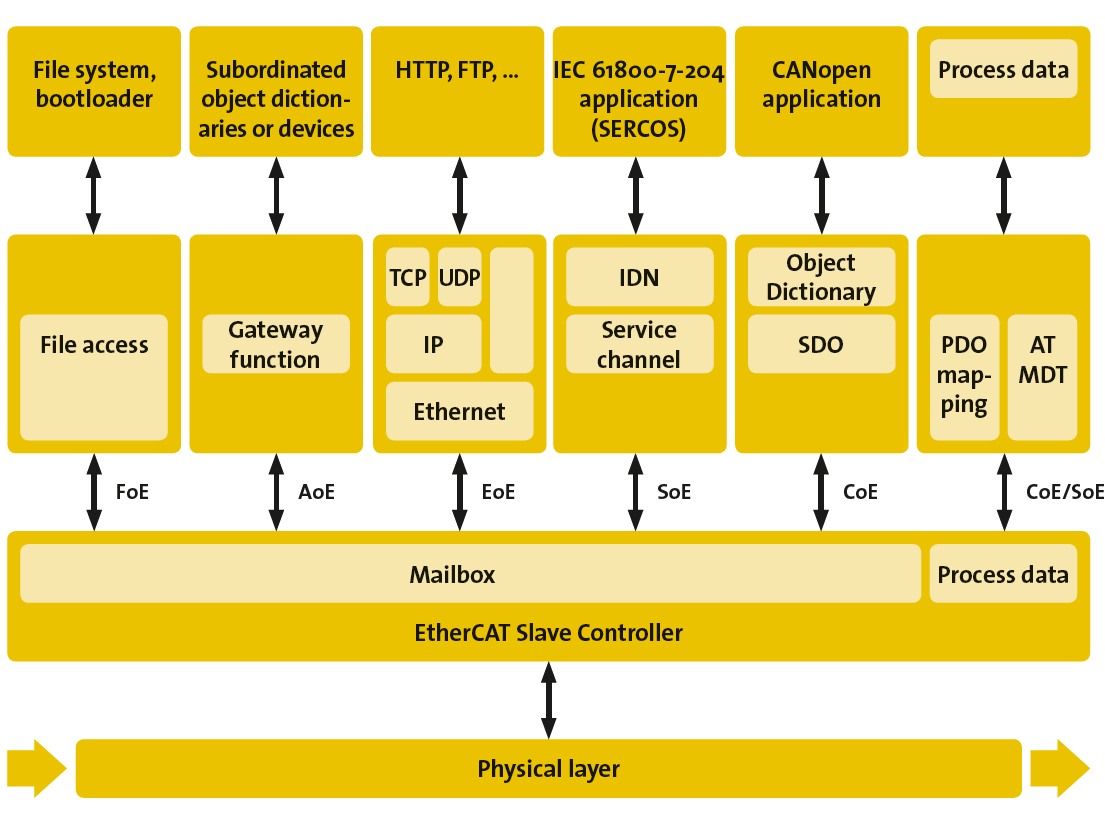
Per supportare un’ampia varietà di dispositivi e livelli applicativi, sono stati stabiliti i seguenti profili di comunicazione EtherCAT:
– Protocollo di applicazione CAN su EtherCAT (CoE)
– Profi lo servoazionamento, secondo IEC 61800-7-204 (SoE)
– Ethernet su EtherCAT (EoE)
– Accesso ai fi le tramite EtherCAT (FoE)
– ADS over EtherCAT (AoE)
Non è necessario che un dispositivo slave supporti tutti i profili di comunicazione; può invece decidere quale profilo sia più adatto alle sue esigenze. Al dispositivo master viene notificato quali profili di comunicazione sono stati implementati tramite il file di descrizione del dispositivo slave.
Con il protocollo CoE, EtherCAT fornisce gli stessi meccanismi di comunicazione della norma CANopen® EN 50325-4: Object Dictionary, Mapping of Process Data Objects (PDO) e Service Data Objects (SDO). Anche la gestione della rete è simile. Ciò consente di implementare EtherCAT con il minimo sforzo nei dispositivi precedentemente equipaggiati con CANopen e anche grandi parti del firmware CANopen sono persino riutilizzabili. Facoltativamente, la limitazione PDO legacy a 8 byte può essere revocata ed è anche possibile utilizzare la larghezza di banda avanzata di EtherCAT per supportare il caricamento dell’intero dizionario degli oggetti.
I profili del dispositivo, come il profilo dell’unità CiA 402, possono anche essere riutilizzati per EtherCAT.
EtherCAT®, EtherCAT P® e Safety over EtherCAT® sono marchi registrati e tecnologie brevettate, concessi in licenza da Beckhoff Automation GmbH, Germania.
CANopen® è un marchio registrato di CAN in Automation e.V. Altri testi e immagini copyright Ethercat Technology Group.

