What is the EtherCAT protocol?
EtherCAT is Industrial Ethernet and utilizes standard frames and the physical layer as defined in the Ethernet Standard IEEE 802.3. However, it also addresses the specific demands faced in the automation industry, where:
- there are hard real-time requirements with deterministic response times
- the system is usually made up of many nodes, each only having a small amount of cyclic process data
- hardware costs are even more important than in IT and office applications
The above requirements make using a standard Ethernet network at the field level practicallyimpossible. If an individual Ethernet telegram is used for each node, the effectivedata rate sinks significantly for just a few bytes of cyclic process data: the shortest Ethernet telegram is 84 bytes long (including the Inter Frame Gap), of which 46 bytes can be used for process data. For example, if a drive sends 4 bytes of process data for the actual position and status information and receives 4 bytes of data for the target
position and control information, the effective data rate for both telegrams sinks to 4/84 = 4.8 %. Additionally, the drive usually has a reaction time that triggers the transmission of the actual values after receiving the target values. At the end, not much of the 100MBit/s transfer rate remains.
Protocol stacks, such as those used in the IT world for routing (IP) connection (TCP), require additional overhead for each node and create further delays through the stack runtimes.
EtherCAT overcomes the difficulties described in the previous section with its high performing mode of operation, in which a single frame is usually sufficient to send and receive control data to and from all nodes!
The EtherCAT master sends a telegram that passes through each node. Each EtherCAT slave device reads the data addressed to it on the fly, and inserts its data in the frame as the frame is moving downstream. The frame is delayed only by hardware propagation delay times. The last node in a segment or branch detects an open port and sends the message back to the master using Ethernet technology’s full duplex feature.
The telegram’s maximum effective data rate increases to over 90 %, and due to the utilization of the full duplex feature, the theoretical effective data rate is even greater than 100 MBits/s.
The EtherCAT master is the only node within a segment allowed to actively send an EtherCAT frame; all other nodes merely forward frames downstream. This concept prevents unpredictable delays and guarantees real-time capabilities.
The master uses a standard Ethernet Media Access Controller (MAC) without an additional communication processor. This allows a master to be implemented on any hardware platform with an available Ethernet port, regardless of which real-time operating system or application software is used.
EtherCAT slave devices use an EtherCAT Slave Controller (ESC) to process frames on the fly and entirely in hardware, making network performance predictable and independent of the individual slave device implementation.

EtherCAT embeds its payload in a standard Ethernet frame. The EtherCAT frame is identified with the Identifier (Ox88A4) in the EtherType field. Since the EtherCAT protocol is optimized for short cyclic process data, the use of bulky protocol stacks, such as TCP/IP or UDP/IP, can be eliminated.
To ensure Ethernet IT communication between the nodes, TCP/IP connections can optionally be tunneled through a mailbox channel without impacting real-time data transfer.
During startup, the master device configures and maps the process data on the slave devices. Different amounts of data can be exchanged with each slave, from one bit to a few bytes, or even up to kilobytes of data.
The EtherCAT frame contains the frame header and one or more datagrams.
The datagram header indicates what type of access the master device would like to execute:
- there are hard real-time requirements with deterministic response times
- the system is usually made up of many nodes, each only having a small amount of cyclic process data
- hardware costs are even more important than in IT and office applications
Logical addressing is used for the cyclical exchange of process data. Each datagram addresses a specific part of the process image in the EtherCAT segment, for which 4 GBytes of address space is available. During network startup, each slave device is assigned one or more addresses in this global address space. If multiple slave devices are assigned addresses in the same area, they can all be addressed with a single datagram. Since the datagrams completely contain all the data access related information, the master device can decide when and which data to access. For example, the master device can use short cycle times to refresh data on the drives, while using a longer cycle time to sample the I/O; a fixed process data structure is not necessary. This also relieves the master device in comparison to in conventional fieldbus systems, in which the data from each node had to be read individually, sorted with the help of the process controller, and copied into memory.
With EtherCAT, the master device only needs to fill a single EtherCAT frame with new out put data, and send the frame via automatic Direct Memory Access (DMA) to the MAC controller.
When a frame with new input data is received via the MAC controller, the master device can copy the frame again via DMA into the computer’s memory – all without the CPU having to actively copy any data.
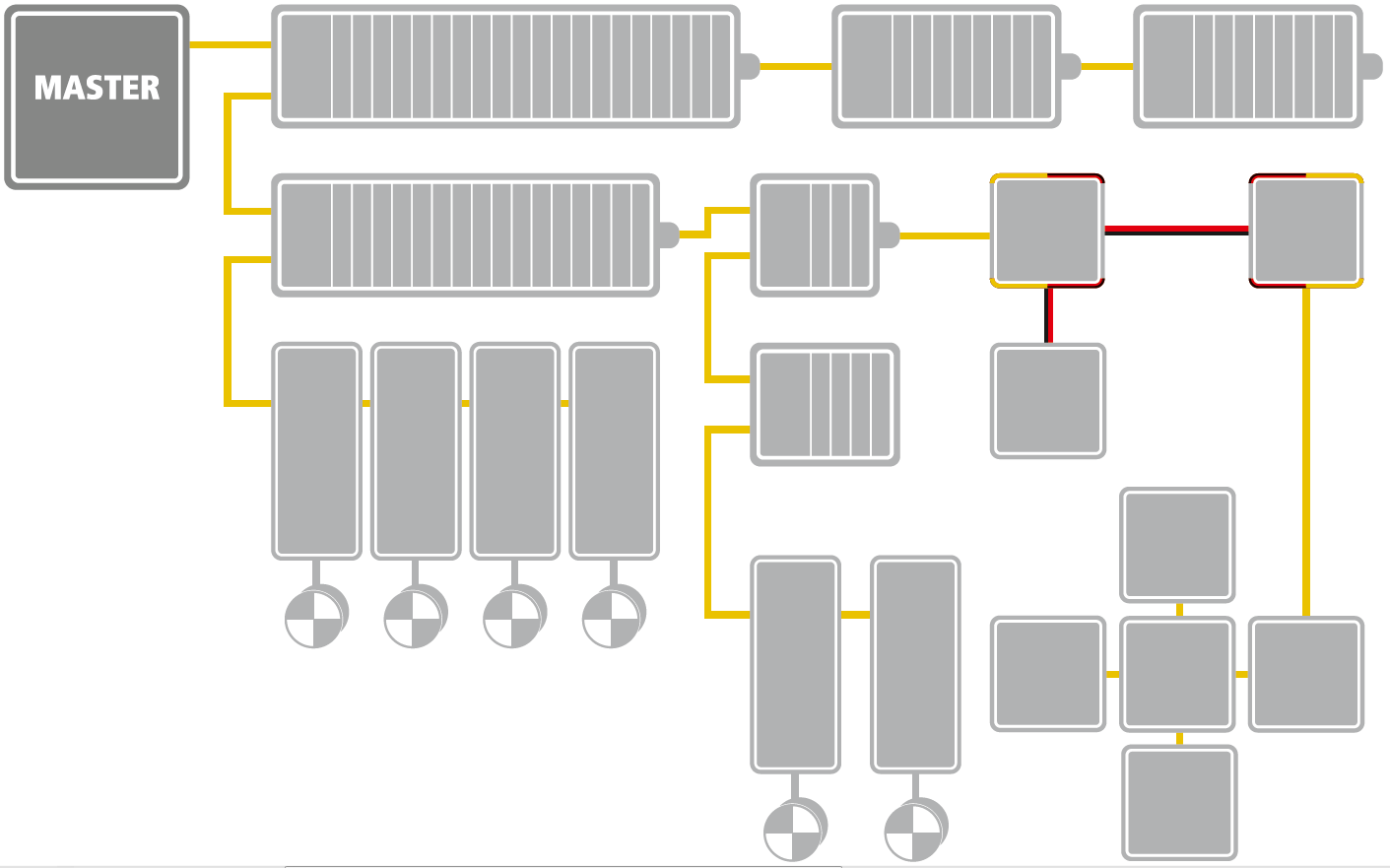
Line, tree, star, or daisy-chain: EtherCAT supports almost all of topologies. EtherCAT makes a pure bus or line topology with hundreds of nodes possible without the limitations that normally arise from cascading switches or hubs.When wiring the system, the combination of lines with branches or drop lines is particularly beneficial: the ports necessary to create branches are directly integrated in many I/O modules, so no additional switches or active infrastructure components are required.
When wiring the system, the combination of lines with branches or drop lines is particularly beneficial: the ports necessary to create branches are directly integrated in many I/O modules, so no additional switches or active infrastructure components are required.
The star topology, the Ethernet classic, can also naturally be utilized.
Modular machines or tool changers require network segments or individual nodes to be connected and disconnected during operation. EtherCAT Slave Controllers already include the basis for this Hot Connect feature. If a neighboring station is removed, then the port is automatically closed so the rest of the network can continue to operate without interference. Very short detection times faster than 15 microseconds guarantee a smooth changeover.
EtherCAT offers a lot of flexibility regarding cable types, so each segment can use the exact type of cable that best meets its needs. Inexpensive industrial Ethernet cable can be used between two nodes up to 100m apart in 100BASE-TX mode. Furthermore, the protocol addition EtherCAT P enables the transmission of data and power via one cable.
This option enables the connection of devices such as sensors with a single line. Optical fibres (such as 100BASE-FX) can also be used, for example for a node distance greater than 100 m. The complete range of Ethernet wiring is also available for EtherCAT.
Up to 65,535 devices can be connected to one EtherCAT segment, so network expansion is virtually unlimited. Because of the practically unlimited number of nodes, modular devices such as sliced I/O stations can be designed in such a way that each module is an
EtherCAT node of its own. Hence, the local extension bus is eliminated; the high performance of EtherCAT reaches each module directly and without any delays, since there is no gateway in the bus coupler or head station any more.
In order to configure and diagnose slave devices, it is possible to access the variables provided for the network with the help of acyclic communication. This is based on a reliable mailbox protocol with an auto-recover function for erroneous messages.
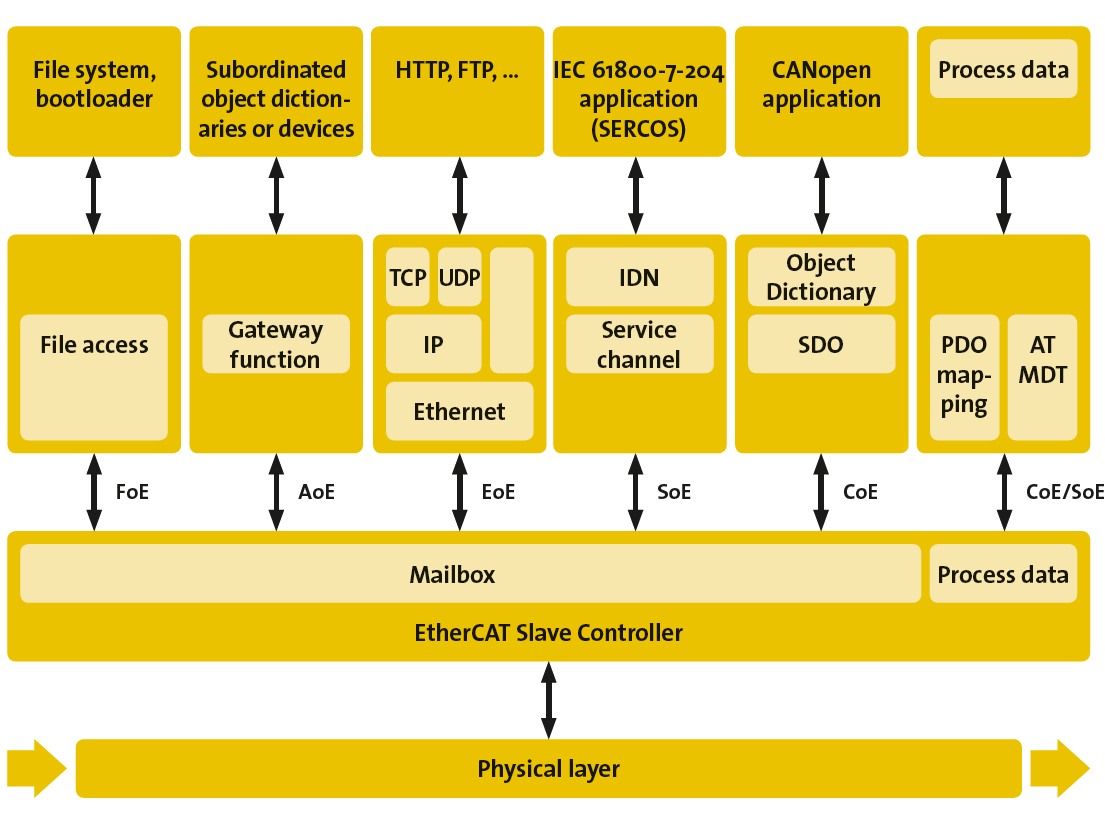
In order to support a wide variety of devices and application layers, the following EtherCAT communication profiles have been established:
- CAN application protocol over EtherCAT (CoE)
- Servo drive profile, according to IEC 61800-7-204 (SoE)
- Ethernet over EtherCAT (EoE)
- File access over EtherCAT (FoE)
- ADS over EtherCAT (AoE)
A slave device isn’t required to support all communication profiles; instead, it may decide which profile is most suitable for its needs. The master device is notified which communication profiles have been implemented via the slave device description file.
With the CoE protocol, EtherCAT provides the same communication mechanisms as in CANopen®-Standard EN 50325-4: Object Dictionary, Mapping of Process Data Objects (PDO) and Service Data Objects (SDO). Even the network management is similar.
This makes it possible to implement EtherCAT with minimal effort in devices that were previously outfitted with CANopen, and large portions of the CANopen Firmware are even reusable. Optionally, the legacy 8-byte PDO limitation can be waived, and it’s also possible to use the enhanced bandwidth of EtherCAT to support the upload of the entire Object Dictionary. The device profiles, such as the drive profile CiA 402, can also be reused for EtherCAT.
EtherCAT®, EtherCAT P®, and Safety over EtherCAT® are registered trademarks and patented technologies, licensed by Beckhoff Automation GmbH, Germany.
CANopen® is a registered trademark of the CAN in Automation e.V. Other text and pictures copyright Ethercat Technology Group.

